| 使用环形缓冲区ringbuffer实现串口数据接收 | 您所在的位置:网站首页 › sdk 串口接收 › 使用环形缓冲区ringbuffer实现串口数据接收 |
使用环形缓冲区ringbuffer实现串口数据接收
|
文章目录
1. ringbuffer简单介绍2. ringbuffer的代码实现2.1 ringbuffer数据结构定义2.2 ringbuffer初始化2.3 ringbuffer写数据2.4 ringbuffer读数据
3. 在串口中使用ringbuffer3.1 为什么需要ringbuffer接收串口数据3.2 初始化串口和ringbuffer3.3 串口中断接收数据
4. 测试结果4.1 测试是否丢包4.2 补充测试
1. ringbuffer简单介绍
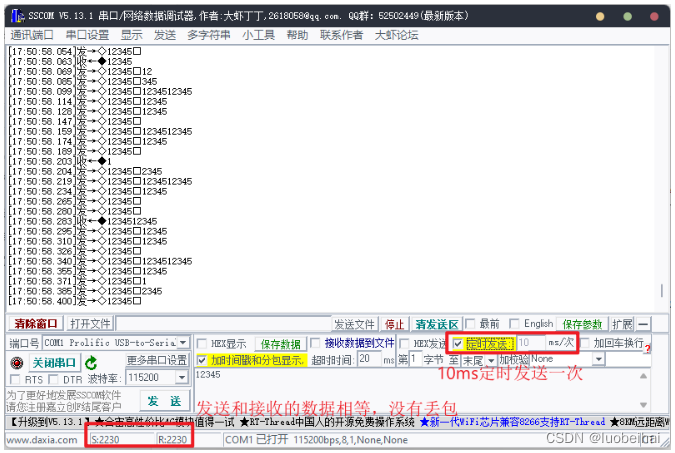
环形缓冲区(ringbuffer),实际上就是一种队列数据结构,只不过它不是线性队列,而是环形队列。 关于环形缓冲区(ringbuffer)的详细介绍,网上一搜一大把,这里不重复介绍了,我这里直接上代码。 详细介绍可以参考下面链接里面的介绍: https://en.wikipedia.org/wiki/Circular_buffer 介绍环形缓冲区的一个网站,写的非常详细。环形缓冲区(Ring Buffer)使用说明 2. ringbuffer的代码实现实现环形缓冲区的形式有使用数组的,也可以使用链表。我这里为了实现简单,就用数组作为 ringbuffer 的内存来实现。 在实现 ringbuffer 时,要有两个指针,读指针和写指针。每当向 ringbuffer 中写入一个数据时,写指针加1;同理从 ringbuffer 中读取一个数据时,读指针加1。 对于 ringbuffer 的读写操作,我们有几个重点问题需要考虑: 读写指针移动到 ringbuffer 的最大长度之后,如何返回首位置? 对于 ringbuffer 的读写指针位置的计算,精髓就在于对读写指针进行取模运算。即当读写指针移动一个位置时,然后对 ringbuffer 的大小进行取模运算,这样当读写指针移动到最末尾时,取模运算的结果就是 0,即返回的 ringbuffer 的首位置了。代码表示如下: write_index : 当前写位置 read_index : 当前读位置 ringbuffer_size : ringbuffer 缓冲区的大小 /* 读写指针每移动一个位置,都对 ringbuffer 大小进行取模运算 */ write_index = (write_index + 1) % ringbuffer_size read_index = (read_index + 1) % ringbuffer_size如何判断 ringbuffer 为空? 读写指针的位置相等时,说明 ringbuffer 为空。 write_index == read_index如何判断 ringbuffer 为满? 当写指针的下一个位置等于读指针的位置时,那么 ringbuffer 为满。 (write_index + 1) % ringbuffer_size == read_index 2.1 ringbuffer数据结构定义ringbuffer 的数据结构封装如下,主要成员有读写指针,还有指向用户提供 buffer 的指针和 buffer 的大小。 其中,读写指针的这两个成员,很可能会因为外部一些原因(比如串口中断)造成读写位置的变化,而这个变化编译器很可能不知道,所以为了防止编译器优化而加上 volatile 关键字修饰。 typedef struct _ringbuffer_t { volatile unsigned int read_index; /* 当前读位置 */ volatile unsigned int write_index; /* 当前写位置 */ unsigned int buffer_size; /* ringbuffer大小 */ unsigned char *buffer_ptr; /* 指向ringbuffer */ } ringbuffer_t; 2.2 ringbuffer初始化 /* * 函数作用 : 初始化ringbuffer结构体(句柄) * 参数 rb : 指向ringbuffer句柄 * 参数 pool : 指向ringbuffer缓冲区,用户调用时一般提供一个数组 * 参数 size : 缓冲区的大小 * 返回值 : 无 */ void ringbuffer_init(ringbuffer_t *rb, unsigned char *pool, unsigned int size) { /* initialize read and write index */ rb->read_index = 0; rb->write_index = 0; /* set buffer pool and size */ rb->buffer_ptr = pool; rb->buffer_size = size; }主要是初始化 ringbuffer_t 结构体成员。用户需要提供一个定义好的数组变量,传递到这个初始化函数中,从而使得 buffer_ptr 这个指向具体 buffer 的成员指向用户提供的一个数组。 2.3 ringbuffer写数据前面已经介绍了,读写指针移动运算的精髓就在于,对 ringbuffer 的大小进行取模运算。 另外,当写指针的下一个位置与当前读位置相等时,说明 ringbuffer 已经满了,这个时候就不再继续向环形缓冲区写入数据了。 代码实现如下: /* * 函数作用 : 向目标缓冲区写入一个字节数据 * 参数 ch : 要写入ringbuffer的数据 * 参数 rb : 指向ringbuffer句柄 * 返回值 : 写入成功返回0,失败返回-1 */ int ringbuffer_write(unsigned char ch, ringbuffer_t *rb) { if (rb->read_index == ((rb->write_index + 1) % rb->buffer_size)) { return -1; } else { rb->buffer_ptr[rb->write_index] = ch; rb->write_index = (rb->write_index + 1) % rb->buffer_size; return 0; } } 2.4 ringbuffer读数据当读写指针相等时,ringbuffer 为空。具体代码实现如下: /* * 函数作用 : 向目标缓冲区读取一个字节数据 * 参数 ch : 把读取到的数据保存到ch所指向的内存 * 参数 rb : 指向ringbuffer句柄 * 返回值 : 读取成功返回0,失败返回-1 */ int ringbuffer_read(unsigned char *ch, ringbuffer_t *rb) { if (rb->read_index == rb->write_index) { return -1; } else { *ch = rb->buffer_ptr[rb->read_index]; rb->read_index = (rb->read_index + 1) % rb->buffer_size; return 0; } } 3. 在串口中使用ringbuffer 3.1 为什么需要ringbuffer接收串口数据串口中断接收数据时,每接收到一个字节数据就会触发一次中断,然后我们再把这一字节的数据交给上一层的程序进行处理。很多时候,如果我们接收到一个字节数据就处理一下,太过于频繁。有时也可能因为数据量太大,或者接收数据太快,而上层代码来不及处理数据,等到下一次接收的数据来到时,很可能会覆盖掉没来得及处理的数据。这是就会出现丢包的现象。 为了防止丢包,我们可以在中断中暂时先把接收到的数据放到一个缓冲区里面,等到CPU去处理时,一次性就把所有的数据都取出来进行处理。而对于这种对数据的读和写的过程,使用环形缓冲区是非常适合的。 3.2 初始化串口和ringbuffer使用串口接收数据,先对串口进行初始化,以及对 ringbuffer 进行初始化。 static unsigned char uart_rx_buffer[16]; // 环形缓冲区所指向的数组 static ringbuffer_t uart_rx_ringbuffer; // 环形缓冲区句柄 UART_HandleTypeDef huart1; void MX_USART1_UART_Init(void) { /* 初始化ringbuffer,使得ringbuffer指向用户提供的数组 */ ringbuffer_init(&uart_rx_ringbuffer, uart_rx_buffer, sizeof(uart_rx_buffer)); /* 串口参数配置 */ huart1.Instance = USART1; huart1.Init.BaudRate = 115200; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; /* 串口引脚初始化 */ if (HAL_UART_Init(&huart1) != HAL_OK) { Error_Handler(); } /* 串口中断配置 */ HAL_NVIC_SetPriority(USART1_IRQn, 4, 0); // 中断优先级配置 HAL_NVIC_EnableIRQ(USART1_IRQn); // 使能串口1中断 __HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE); // 使能串口1接收中断 } 3.3 串口中断接收数据在串口中断中,把接收到的数据保存到我们刚刚定义的 ringbuffer 中。 void USART1_IRQHandler(void) { int ch = -1; if ((__HAL_UART_GET_FLAG(&(huart1), UART_FLAG_RXNE) != RESET) && (__HAL_UART_GET_IT_SOURCE(&(huart1), UART_IT_RXNE) != RESET)) { while (1) { ch = -1; if (__HAL_UART_GET_FLAG(&(huart1), UART_FLAG_RXNE) != RESET) { ch = huart1.Instance->DR & 0xff; } if (ch == -1) { break; } /* 中断接收到的数据,存入 ringbuffer */ ringbuffer_write(ch, &uart_rx_ringbuffer); } } } 4. 测试结果 4.1 测试是否丢包使用串口助手,每隔 10ms 自动发送一次数据,而在 main 函数故意延时20ms再去把 ringbuffer 的数据读出来在发送到串口助手上。 我们前面的代码定义的 ringbuffer 的大小是 16 字节,在串口助手中,当我们每隔 10ms 发送 5 个字节时,main 函数延时 20ms 再接收。这时可以发现是没有出现丢包的现象的,实验结果如下:
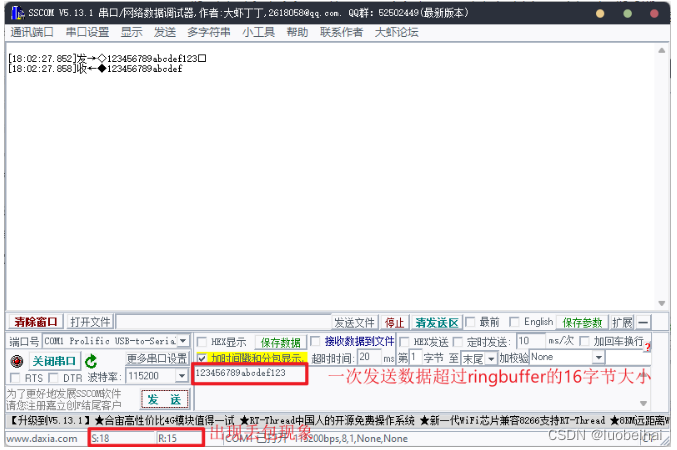
但是,如果我们一次性发送的数据大于 ringbuffer 的大小(16字节)时,那么就会出现丢包的现象了。
另外,如果每 10ms 一次性发送 10 个字节,由于 main 函数延时了 20ms 才去处理数据,如果长期堆积下去的话,这时也会造成数据丢包的现象。 所以说,如果我们一次性要接收的数据量太大,或者说处理的速度太慢,为了防止数据丢包现象,最好自己评估把 ringbuffer 的大小设置大一点。 |
【本文地址】
| 今日新闻 |
| 推荐新闻 |
| 专题文章 |